这次就来说说基于上一节介绍的系统框图去建立我们所需要的任务,顺便学习Raw-OS提供的API,根据上节的分析,对于Slave Board有如下设计:
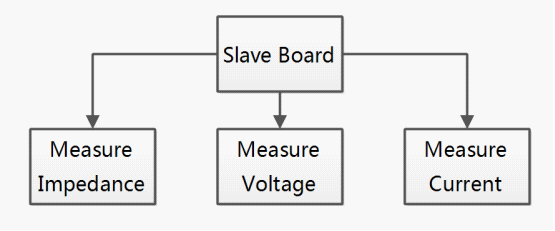
Slave Board有三个任务,分别负责测试阻抗,电压,电流功能,至于底层实现先不管,先把任务框架设计出来~
对于任务相关的操作,Raw-OS提供一组API操作,用到什么解释什么,说多了都是泪~
首先建立任务用到的API是raw_task_create,详细的解释见下文~
/************************************************************************************************************************** Create a task** Description: This function is called to create a task.** Arguments : task_obj is a pointer to the RAW_TASK_OBJ.* ------* task_name is a string name assigned to a task* ------* task_arg is an argument passing to task* ------* task_prio is a priority to task, smalled priority is higher priority* -------* time_slice is run time slice tick to task, assign to 0 means it will accept default slice time* -------* task_stack_base is a low address of memory* ------* stack_size is the number of stack elements of this task* ------* task_entry is the entry of this task* ------* auto_start is the flag to activate task:* RAW_AUTO_START 1* RAW_DONT_START 0* * Returns : RAW_IDLE_EXIT the idle priority should only be created once.* -----* RAW_OS_STOPPED raw os has not been started yet* -----* RAW_SUCCESS raw os return success.** Note(s) :** *************************************************************************************************************************/#if (CONFIG_RAW_TASK_CREATE > 0)RAW_U16 raw_task_create(RAW_TASK_OBJ *task_obj, RAW_U8 *task_name, RAW_VOID *task_arg, RAW_U8 task_prio, RAW_U32 time_slice, PORT_STACK *task_stack_base, RAW_U32 stack_size, RAW_TASK_ENTRY task_entry, RAW_U8 auto_start)
首先,建立任务所需要的参数,包括:任务优先级,任务堆栈,任务对象,任务时间片~
/* tasks parameters */#define IMPEDANCE_PRIO 10#define IMPEDANCE_SLICE 100#define VOLTAGE_PRIO 10#define VOLTAGE_SLICE 100#define CURRENT_PRIO 10#define CURRENT_SLICE 100/* task stack */PORT_STACK impedance_stack[TASK_STK_SIZE];PORT_STACK voltage_stack[TASK_STK_SIZE];PORT_STACK current_stack[TASK_STK_SIZE];/* task instance */RAW_TASK_OBJ taskMeasureImpedance_obj;RAW_TASK_OBJ taskMeasureVoltage_obj;RAW_TASK_OBJ taskMeasureCurrent_obj;
那么,首先建立slave_board.c把slave_board的任务建立好~3个任务~
/* taskMeasureImpedance function */void taskMeasureImpedance(void *pParam){ /* taskMeasureImpedance loop */ while(1){ }}/* taskMeasureVoltage function */void taskMeasureVoltage(void *pParam){ /* taskMeasureVoltage loop */ while(1){ }}/* taskMeasureCurrent function */void taskMeasureCurrent(void *pParam){ /* taskMeasureCurrent loop */ while(1){ }}
顺利建立好3个任务之后,封装到到一个专门负责slave任务建立的函数中~
int slaveTaskInit(void){ RAW_U32 resultImpedance = -1; RAW_U32 resultVoltage = -1; RAW_U32 resultCurrent = -1; raw_printk("\n"); raw_printk("====== Slave Board Tasks Setup ======\n"); /* Creat taskMeasureImpedance */ resultImpedance = raw_task_create(&taskMeasureImpedance_obj, "taskMeasureImpedance", NULL, IMPEDANCE_PRIO, IMPEDANCE_SLICE, impedance_stack, TASK_STK_SIZE, taskMeasureImpedance, 0); if(resultImpedance == RAW_OS_STOPPED){ raw_printk("creat taskMeasureImpedance successful ...\n"); } else{ raw_printk("creat taskMeasureImpedance faild with error code : %x ... \n", resultImpedance); RAW_ASSERT(0) } /* Creat taskMeasureVoltage */ resultVoltage = raw_task_create(&taskMeasureVoltage_obj, "taskMeasureVoltage", NULL, VOLTAGE_PRIO, VOLTAGE_SLICE, voltage_stack, TASK_STK_SIZE, taskMeasureVoltage, 0); if(resultVoltage == RAW_OS_STOPPED){ raw_printk("creat taskMeasureVoltage successful ...\n"); } else{ raw_printk("creat taskMeasureVoltage faild with error code : %x ... \n", resultVoltage); RAW_ASSERT(0) } /* Creat taskMeasureCurrent */ resultCurrent = raw_task_create(&taskMeasureCurrent_obj, "taskMeasureCurrent", NULL, CURRENT_PRIO, CURRENT_SLICE, current_stack, TASK_STK_SIZE, taskMeasureCurrent, 0); if(resultCurrent == RAW_OS_STOPPED){ raw_printk("creat taskMeasureCurrent successful ...\n"); } else{ raw_printk("creat taskMeasureCurrent faild with error code : %x ... \n", resultCurrent); RAW_ASSERT(0) } raw_printk("\n"); return 0;}
对于master board也有相似的过程~建立master board任务如下:
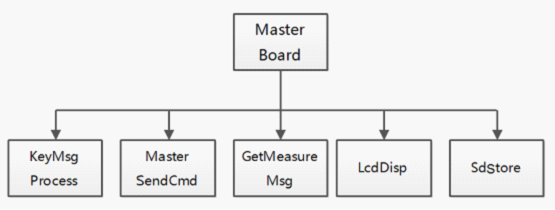
对应slave board任务建立的过程,编写master board任务,并且最后封装到负责master任务建立的函数~
#include "application.h"#define TASK_STK_SIZE 512/* tasks parameters */#define KEY_MSG_PROCESS_PRIO 10#define KEY_MSG_PROCESS_SLICE 100#define MASTER_SEND_CMD_PRIO 10#define MASTER_SEND_CMD_SLICE 100#define GET_MEASURE_MSG_PRIO 10#define GET_MEASURE_MSG_SLICE 100#define LCD_DISP_PRIO 10#define LCD_DISP_SLICE 100#define SD_STORE_PRIO 10#define SD_STORE_SLICE 100/* task stack */PORT_STACK key_msg_process_stack[TASK_STK_SIZE];PORT_STACK master_send_cmd_stack[TASK_STK_SIZE];PORT_STACK get_measure_msg_stack[TASK_STK_SIZE];PORT_STACK lcd_disp_stack[TASK_STK_SIZE];PORT_STACK sd_store_stack[TASK_STK_SIZE];/* task instance */RAW_TASK_OBJ taskKeyMsgProcess_obj;RAW_TASK_OBJ taskMasterSendCmd_obj;RAW_TASK_OBJ taskGetMeasureMsg_obj;RAW_TASK_OBJ taskLcdDisp_obj;RAW_TASK_OBJ taskSdStore_obj;/* taskKeyMsgProcess function */void taskKeyMsgProcess(void *pParam){ /* taskKeyMsgProcess loop */ while(1){ }}/* taskMasterSendCmd function */void taskMasterSendCmd(void *pParam){ /* taskMasterSendCmd loop */ while(1){ }}/* taskGetMeasureMsg function */void taskGetMeasureMsg(void *pParam){ /* taskGetMeasureMsg loop */ while(1){ }}/* taskLcdDisp function */void taskLcdDisp(void *pParam){ /* taskLcdDisp loop */ while(1){ }}/* taskSdStore function */void taskSdStore(void *pParam){ /* taskSdStore loop */ while(1){ }}int masterTaskInit(void){ RAW_U32 resultKeyMsgProcess = -1; RAW_U32 resultMasterSendCmd = -1; RAW_U32 resultGetMeasureMsg = -1; RAW_U32 LcdDisp = -1; RAW_U32 SdStore = -1; raw_printk("\n"); raw_printk("====== Master Board Tasks Setup ======\n"); /* Creat KeyMsgProcess */ resultKeyMsgProcess = raw_task_create(&taskKeyMsgProcess_obj, "taskKeyMsgProcess", NULL, KEY_MSG_PROCESS_PRIO, KEY_MSG_PROCESS_SLICE, key_msg_process_stack, TASK_STK_SIZE, taskKeyMsgProcess, 0); if(resultKeyMsgProcess == RAW_OS_STOPPED){ raw_printk("creat KeyMsgProcess successful ...\n"); } else{ raw_printk("creat KeyMsgProcess faild with error code : %x ... \n", resultKeyMsgProcess); RAW_ASSERT(0) } /* Creat MasterSendCmd */ resultMasterSendCmd = raw_task_create(&taskMasterSendCmd_obj, "taskMasterSendCmd", NULL, MASTER_SEND_CMD_PRIO, MASTER_SEND_CMD_SLICE, master_send_cmd_stack, TASK_STK_SIZE, taskMasterSendCmd, 0); if(resultMasterSendCmd == RAW_OS_STOPPED){ raw_printk("creat taskMasterSendCmd successful ...\n"); } else{ raw_printk("creat taskMasterSendCmd faild with error code : %x ... \n", resultMasterSendCmd); RAW_ASSERT(0) } /* Creat taskGetMeasureMsg */ resultGetMeasureMsg = raw_task_create(&taskGetMeasureMsg_obj, "taskGetMeasureMsg", NULL, GET_MEASURE_MSG_PRIO, GET_MEASURE_MSG_SLICE, get_measure_msg_stack, TASK_STK_SIZE, taskGetMeasureMsg, 0); if(resultGetMeasureMsg == RAW_OS_STOPPED){ raw_printk("creat taskGetMeasureMsg successful ...\n"); } else{ raw_printk("creat taskGetMeasureMsg faild with error code : %x ... \n", resultGetMeasureMsg); RAW_ASSERT(0) } /* Creat taskLcdDisp */ LcdDisp = raw_task_create(&taskLcdDisp_obj, "taskLcdDisp", NULL, LCD_DISP_PRIO, LCD_DISP_SLICE, lcd_disp_stack, TASK_STK_SIZE, taskLcdDisp, 0); if(LcdDisp == RAW_OS_STOPPED){ raw_printk("creat taskLcdDisp successful ...\n"); } else{ raw_printk("creat taskLcdDisp faild with error code : %x ... \n", LcdDisp); RAW_ASSERT(0) } /* Creat taskSdStore */ SdStore = raw_task_create(&taskSdStore_obj, "taskSdStore", NULL, SD_STORE_PRIO, SD_STORE_SLICE, sd_store_stack, TASK_STK_SIZE, taskSdStore, 0); if(SdStore == RAW_OS_STOPPED){ raw_printk("creat taskSdStore successful ...\n"); } else{ raw_printk("creat taskSdStore faild with error code : %x ... \n", SdStore); RAW_ASSERT(0) } raw_printk("\n"); return 0;}
好了,到此结束了,这次先把任务建立起来,可以下载Raw-OS的kernel看看任务头文件还有那些函数可用,先熟悉熟悉,至于编程练习,可以自行试试,至少一半的函数都用用。
/* 2012-4 Created by jorya_txj * xxxxxx please added here */ #ifndef RAW_TASK_H#define RAW_TASK_Htypedef RAW_VOID (*RAW_TASK_ENTRY)(RAW_VOID *p_arg);RAW_U16 raw_task_create(RAW_TASK_OBJ *task_obj, RAW_U8 *task_name, RAW_VOID *task_arg, RAW_U8 task_prio, RAW_U32 time_slice, PORT_STACK *task_stack_base, RAW_U32 stack_size, RAW_TASK_ENTRY task_entry, RAW_U8 auto_start);RAW_U16 raw_disable_sche(void);RAW_U16 raw_enable_sche(void);RAW_U16 raw_sleep(RAW_TICK_TYPE dly);RAW_U16 raw_time_sleep(RAW_U16 hours, RAW_U16 minutes, RAW_U16 seconds, RAW_U32 milli);#if (CONFIG_RAW_TASK_SUSPEND > 0)RAW_U16 raw_task_suspend(RAW_TASK_OBJ *task_ptr);RAW_U16 raw_task_resume(RAW_TASK_OBJ *task_ptr);RAW_U16 task_suspend(RAW_TASK_OBJ *task_ptr);RAW_U16 task_resume(RAW_TASK_OBJ *task_ptr);#endif#if (CONFIG_RAW_TASK_PRIORITY_CHANGE > 0)RAW_U16 raw_task_priority_change (RAW_TASK_OBJ *task_ptr, RAW_U8 new_priority, RAW_U8 *old_priority);#endif#if (CONFIG_RAW_TASK_DELETE > 0)RAW_U16 raw_task_delete(RAW_TASK_OBJ *task_ptr);#endif#if (CONFIG_RAW_TASK_WAIT_ABORT > 0)RAW_U16 raw_task_wait_abort(RAW_TASK_OBJ *task_ptr);#endif#if (CONFIG_SCHED_FIFO_RR > 0)RAW_U16 raw_task_time_slice_change(RAW_TASK_OBJ *task_ptr, RAW_U32 new_time_slice);RAW_U16 raw_set_sched_way(RAW_TASK_OBJ *task_ptr, RAW_U8 policy);RAW_U16 raw_get_sched_way(RAW_TASK_OBJ *task_ptr, RAW_U8 *policy_ptr);#endifRAW_TASK_OBJ *raw_task_identify(void);#if (CONFIG_RAW_TASK_STACK_CHECK > 0)RAW_U16 raw_task_stack_check(RAW_TASK_OBJ *task_obj, RAW_U32 *free_stack);#endif#if (CONFIG_USER_DATA_POINTER > 0)RAW_VOID raw_set_task_user_point(RAW_TASK_OBJ *task_ptr, RAW_VOID *user_point, RAW_U32 point_position);RAW_VOID *raw_get_task_user_point(RAW_TASK_OBJ *task_ptr, RAW_U32 point_position);#endif#if (CONFIG_RAW_DEBUG > 0)RAW_U16 raw_iter_block_task(LIST *object_head, RAW_VOID (*debug_function)(RAW_TASK_OBJ *), RAW_U8 opt);RAW_U32 raw_get_system_global_space(void);#endif#define RAW_TASK_AUTO_START 1#define RAW_TASK_DONT_START 0#endif
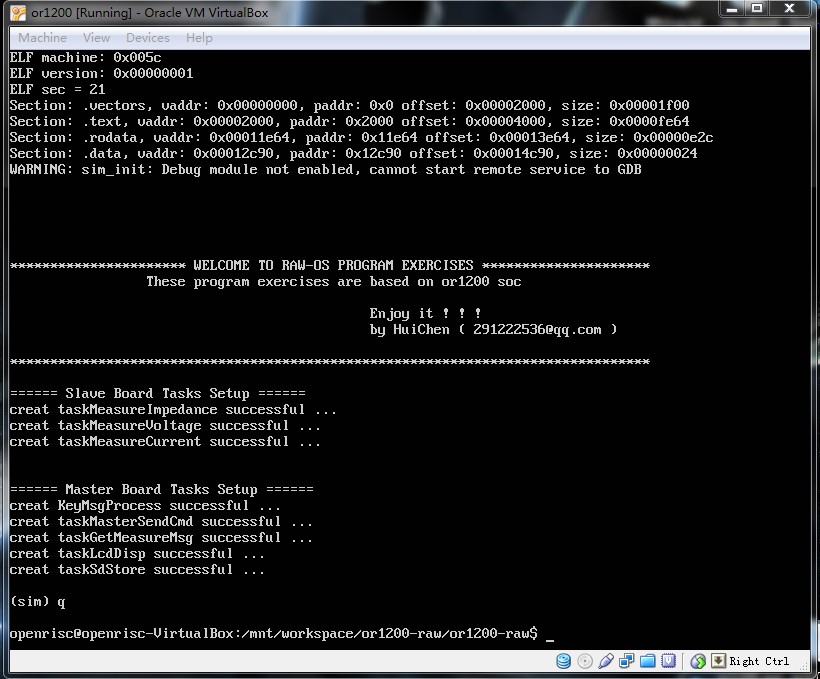
最后,在linux下openrisc架构验证的信息是这样的:
在Raw-OS的官网下载相关API说明,看看任务相关还有哪些函数可用,小弟也会本着用到再去解释的原则去说明一下,希望大家继续支持Raw-OS发展哈~
好了,下次见,荆轲刺秦王~~~